 |
 |
| Tensegrity Robots: Inspired by Nature and Toys | Black Girls Code with Tensegrities: Jasmine Gipson Lead Graduate Student (right) |
Tensegrity robots are revolutionary soft robotic concepts that integrate biomimetics and tensegrity structures. Tensegrity robots are composed of purely tensile and compressive components (cables and rods). We are exploring co-robot applications (where humans and robots work as partners) since they are unlikely to harm their environment or human users. The application areas we are pursuing include space exploration, home health care, and search & rescue. Our tensegrity robot research has been featured in Wired Magazine, the Economist, the Smithsonian, Discovery Channel and IEEE Spectrum. We are part of the Robots and People initiative at CITRIS (Center for Information Technology in the Interest of Society).
The BEST team researches multiple different types of tensegrity structures for robotics applications. In particular, we have teams developing spherical tensegrity structures for hopping and rolling motion, and a team working on a walking robot with a flexible spine called Laika, the walking tensegrity quadruped.
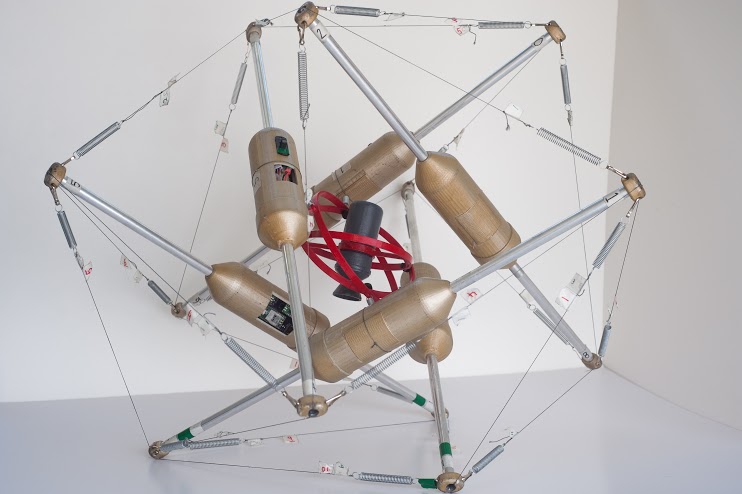
Working with Vytas SunSpiral and Adrian Agogino from the Intelligent Systems Division of the NASA Ames Research Center, we have recently won a new grant from NASA titled: Precision Hopping/Rolling Robotic Surface Probe Based on Tensegrity Structures (ESI NASA Grant NNX15AD74G-Agogino). Tensegrity structures are composed of pure compression and tension elements. They can be lightweight, reliable and deployable. Mission Scenario: Tightly packed tensegrity probe can expand, then travel 1 km using gas thruster over series of hops. The same tensegrity structure which cushioned the landing is then used for mobility down cliff wall, over sand dunes and through lava tubes, then accurately delivers 1 kg of payload protected in center. The Berkeley rapidly-prototyped tensegry robot (Version 3) below illustrates the location of the cold gas thruster and payload at the center.

 |
 |
Professor Alice Agogino and her team introduce the BEST Lab’s tensegrity research in the video (below).
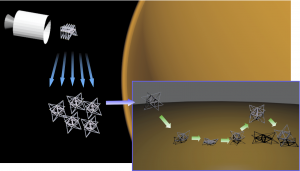
The simulated images and animations below are for the Super Ball Bots application envisioned for space applications where they could deployed and bounce to a landing on Titan (moon of Saturn) before moving and exploring the surface.
See video of NASA collaborators Adrian Agogino and Vytas SunSpiral explain the structural advantages of tensegrity robots in this article and video (below right): NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan, IEEE Spectrum, December 2013.
Also see Kyunam Kim’s simulation of the Super Bot robot using a lumped mass model of six struts (below left), and our recently developed rapid prototyping six-strut tensegrity robot (below right).
A link to the 2015-2016 Master of Engineering teams’ page is here. Also see Tensegrity Robots for Home Healthcare.
Masters of Engineering 2017-2018 students:
We are looking for 3-4 highly motivated students to work in the following areas
- Investigation of impact response and payload protection characteristics of spherical tensegrity robots. Student(s) will work closely with a current PhD student in the design and fabrication of impact experiments which will be conducted on active and passive tensegrity structures. These tests will provide information on the robot’s survivability and robustness under various impact conditions and inform future design decisions.
- Design of a proof of concept search and rescue scenario involving the aerial deployment of a tensegrity robot and subsequent navigation to location of interest on rugged terrain. Student(s) will solve challenging mission-level planning problems as well as work on the design and control of robust hardware for demonstrations.
Students in the Controls or Design subject areas will be eligible for these projects. If you are interested, come see us at the capstone info fair on Friday, August 18th, 2017.
Related News and Videos
- Videos from our YouTube Channel.
- Photos from Discovery Channel Filming, October 24, 2015.
- Tensegrity: A Soft Robot, Fung Institute of Engineering Leadership.
- Science Now radio: The next generation of space exploring robots, Dec. 17, 2015, http://bit.ly/1PjJnua
- Shape-shifting robots? Child’s play, Berkeley News, October 23, 2015. Excerpt: The rigid parts of the “six-bar tensegrity structure” seen in this video are held together not by nails or screws, but by wires, cables or elastic bands, lending it some remarkable properties. “It can be squashed, it can be dropped, it can change its shape,” says Alice Agogino, professor of mechanical engineering.
- Engineering is Exploring Space with Shape-Shifting Robots, KQED e-book, October 22, 2015.
- Photos from Demonstration to NASA Deputy Director.
- BEST Lab Demos Tensegrity Robots to NASA Deputy Director, July 17, 2015.
- “Tensegrity Robots for Space Exploration”, Bay Area Robotics Symposium 2015 (Slides (w/o video)
- NASA to replace Rovers by new breed of bouncing robots for future Mars mission: Researchers at the University of California, Berkeley and NASA are trying to create a robust robot that can soon replace the rovers on regular NASA missions. The…, PC Tablet, April 18, 2015.
- “New robot bounces, could replace rovers on NASA missions,” Martyn Williams, IDG News Service, April 15, 2015. Researchers at NASA and the University of California at Berkeley are developing a robot that’s robust enough to be dropped directly onto planets and go straight to work.
- NASA’s Next Space Robot Was Inspired by a Baby’s Toy, Smithsonian, March 5, 2015.
- A Robot That Collapses Under Pressure (In a Good Way), Wired Magazine, March 5, 2015.
- NASA’s Super Ball Bot Could Be the Best Design for Planetary Exploration, IEEE Spectrum, March 2, 2015.
- Tensegrity Robotics Project and ME110 (New Product Development) 2013 Projects Featured in Wired Magazine.
- NASA’s Latest Robot: A Rolling Tangle of Rods That Can Take a Beating, Wired Magazine, February 26, 2014 (also Wired UK, Nasa’s new space robot moves like tumbleweed, February 27, 2014).
- NASA Super Ball Bot Would Crash Land… On Purpose: The collapsible, flexible rover can be dropped onto an alien surface from 60 miles away, Robotics Trends, January 2, 2014.
- NASA’s Bouncy Super Ball Bots May be Planetary Rovers of the Future [VIDEO], Nature World News, December 30, 2013.
- NASA’s Next Rover May Be This Crazy Walking Sphere, The Atlantic, December 30, 2013.
- NASA ‘Super Ball Bot’ Can Survive 60-Mile Drop Onto Alien World Without Landing Equipment, International Business Times, December 29, 2013.
- NASA’s Super Ball Bot Will Be Exploring The Surface Of Titan, Inventorspot.com, December 28, 2013.
- NASA’s next robot rover squishes like a child’s toy: Super Ball Bot benefits from a bouncy design, theVerge, December 27, 2013.
- NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan, IEEE Spectrum, December 23, 2013.
- A Super Ball Bot for Titan: A Baby Step To Learning About Saturn’s Unique Moon, Astrobiology Magazine, October 10, 2013.
- Super Ball Bot – A Robot Launched by NASA!,Techbuzzer.com, February 19, 2013.
- NASA’s Crazy Robotics Lab, BBC News, February 3, 2013.
- BEST Lab collaborators Adrian Agogino and Vytas SunSpiral from the Intelligent Systems Division of the NASA Ames Research Center were recently interviewed by IEEE Spectrum. The article (NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan) and YouTube video (This Jumble of Tent Poles Could Be NASA’s Next Titan-exploring Robot) were released on December 23, 2013. Since then the article has been propagated world-wide and the video has gone viral with close to 400,000 views and still counting. Google has tracked over 60 articles on this story as well. This video is a mash-up by slate video that starts with an old film of the original super ball. More on this project and our collaboration at BEST (Berkeley Emergent Space Tensegrities).
Related Publications
- L.-H. Chen, P. Keegan, M. Yuen, A.M. Agogino, R.K. Kramer, A.K. Agogino and V. SunSpiral. “Soft Robots Using Compliant Tensegrity Structures and Soft Sensors”. Presented at Soft Robotics Workshop, ICRA 2015.
- Kyunam Kim, Adrian K. Agogino, Aliakbar Toghyan, Deaho Moon, Laqshya Taneja, Alice M. Agogino. “Robust Learning of Tensegrity Robot Control for Locomotion through Form-Finding.” International Conference on Intelligent Robots and Systems (IROS 2015), Hamburg, Germany, 2015.
- Kyunam Kim, Adrian K. Agogino, Alice M. Agogino. “Emergent Form-Finding for Center of Mass Control of Ball-Shaped Tensegrity Robots.” Presented at workshop at ARMS (Autonomous Robots and Multirobot Systems) workshop, Istanbul, Turkey, May 4-5.
- Andrew P. Sabelhaus, Jonathan Bruce, Ken Caluwaerts, Pavlo Manovi, Roya Fallah Firoozi, Sarah Dobi, Alice M. Agogino, Vytas SunSpiral. “System Design and Locomotion of SUPERball, and Autonomous Tensegrity Robot.” Proceedings of the International Conference on Robotics and Automation (ICRA) 2015.
- Kyunam Kim, Adrian K. Agogino, Deaho Moon, Laqshya Taneja, Aliakbar Toghyan, Borna Dehghani, Vytas SunSpiral, Alice M. Agogino. “Rapid Prototyping Design and Control of Tensegrity Soft Robot for Locomotion.” In Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO2014), December 2014, Bali, Indonesia. Finalist Best Student Paper. (Video of experiments)
- Jonathan Bruce, Ken Caluwaerts, Atil Iscen, Andrew P. Sabelhaus, and Vytas SunSpiral. “Design and Evolution of a Modular Tensegrity Robot Platform.” International Conference on Robotics and Automation (ICRA), May 2014.
-
Jonathan Bruce, Andrew P. Sabelhaus, Ken Caluwaerts, Alice M. Agogino, Vytas SunSpiral. “SUPERball: Exploring Tensegrities for Planetary Probes.” 12th International Symposium on Artificial Intelligence, Robotics, and Automation in Space (i-SAIRAS). June 2014.
- Andrew P. Sabelhaus, Ken Caluwaerts, Jonathan Bruce, Alice M. Agogino, Vytas SunSpiral. “SUPERball: Modular Hardware for a Mobile Tensegrity Robot.” 6th World Conference on Structural Control and Monitoring (6WCSCM), Special Session on Tensegrity Systems. June 2014.
- Super Ball Bot – Structures for Planetary Landing and Exploration with Report and Presentation.
- “Presentation on Tensegrity Robots for Planetary Exploration,” NASA Ames, March 21, 2013.
Internal Resources
Useful Tensegrity publications: https://drive.google.com/drive/u/0/folders/0B_-dTkwUMAzUbjZaWmhBRWFDRkU
Feature Image Caption: BEST Team with versions of tensegrity robots, Fall 2014 (back) Aliakbar Toghyan, Kyunam Kim, Xiang Li, Borna Dehghani, Azhar Khaderi, Hao Ji(front) Andrew P. Sabelhaus, Prof. Alice M. Agogino, Jasmine Gipson, Yakshu Madaan, Hugo Wagner.