Featured image of 2017 capstone team members, mentors and NASA scientists: Alice Agogino (faculty mentor), Drew Sabelhaus (doctoral student mentor), Lara Janse van Vuuren (MEng student), Huajing (Shirley) Zhao (MEng student), Asher Saghian(MEng student), Shu Jun Tan(MEng student), Robel Tweeldebirhan (MEng student), Jonathan Bruce (NASA Ames roboticist) and Adrian K. Agogino (NASA Ames roboticist). This team won the 2017 Fung Institute Mission Award.
Laika, the quadruped robot with a tensegrity spine
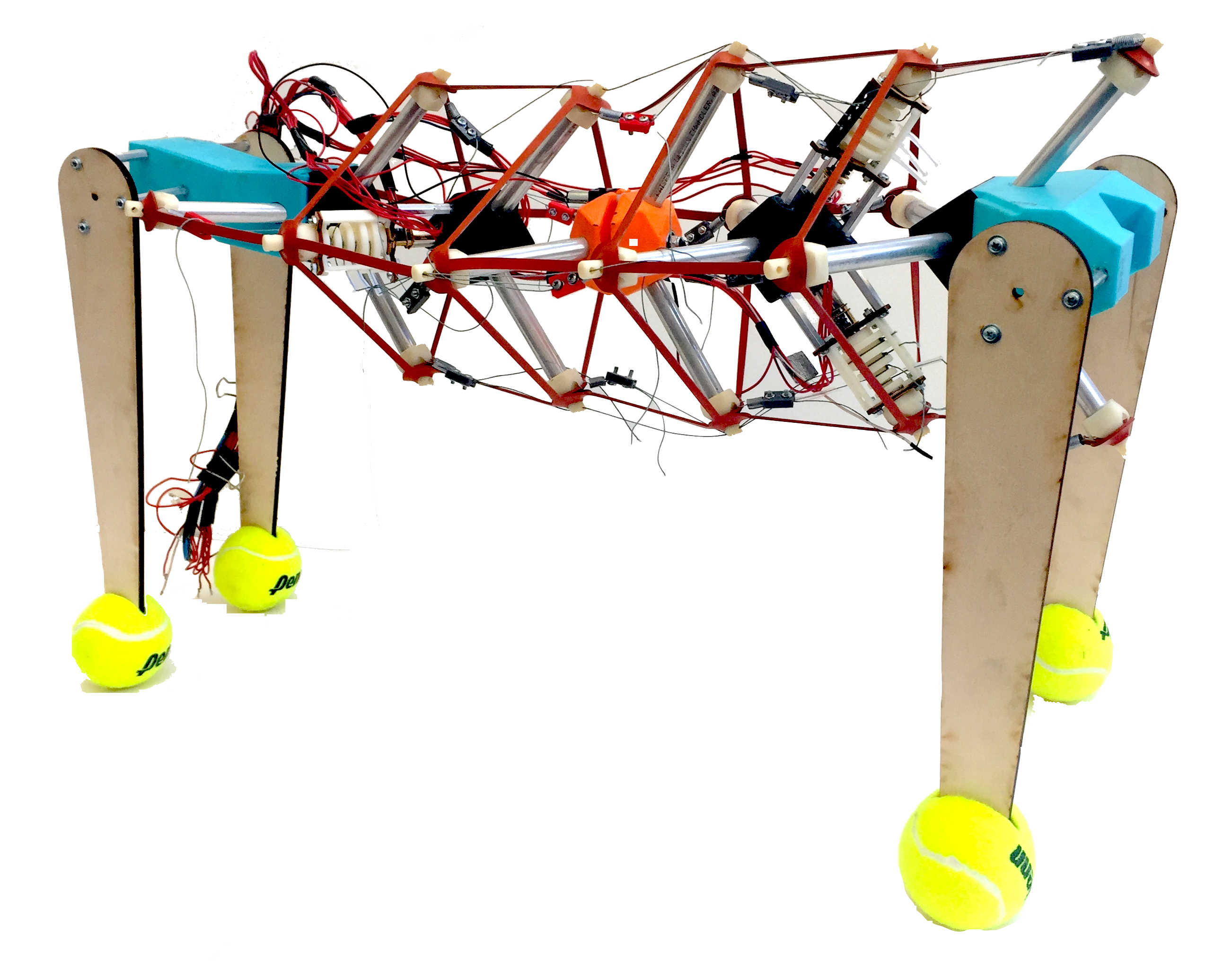
The Berkeley Emergent Space Tensegritites Lab is researching flexible tensegrity spines for walking robots. Robots with flexible spines have many potential advantages over those with rigid body structures. Motion between a robot’s hips and shoulders could allow for more complex and efficient locomotion for quadrupeds, as well as greater ability to traverse unknown terrain and interact with unknown environments while keeping stable and safe. This project, the walking quadrupeds Laika and Belka, is designed to utilize a tensegrity spine as its backbone.
We’ve worked on Laika’s spine itself, the Underactuated Lightweight Tensegrity Robotic Assistive Spine (ULTRA Spine), as well as the supporting hardware for Laika’s legs.
A test that shows Laika’s spine in hardware is shown below. With a stiff spine, when the robot encounters an obstacle underneath its foot, it tips over.
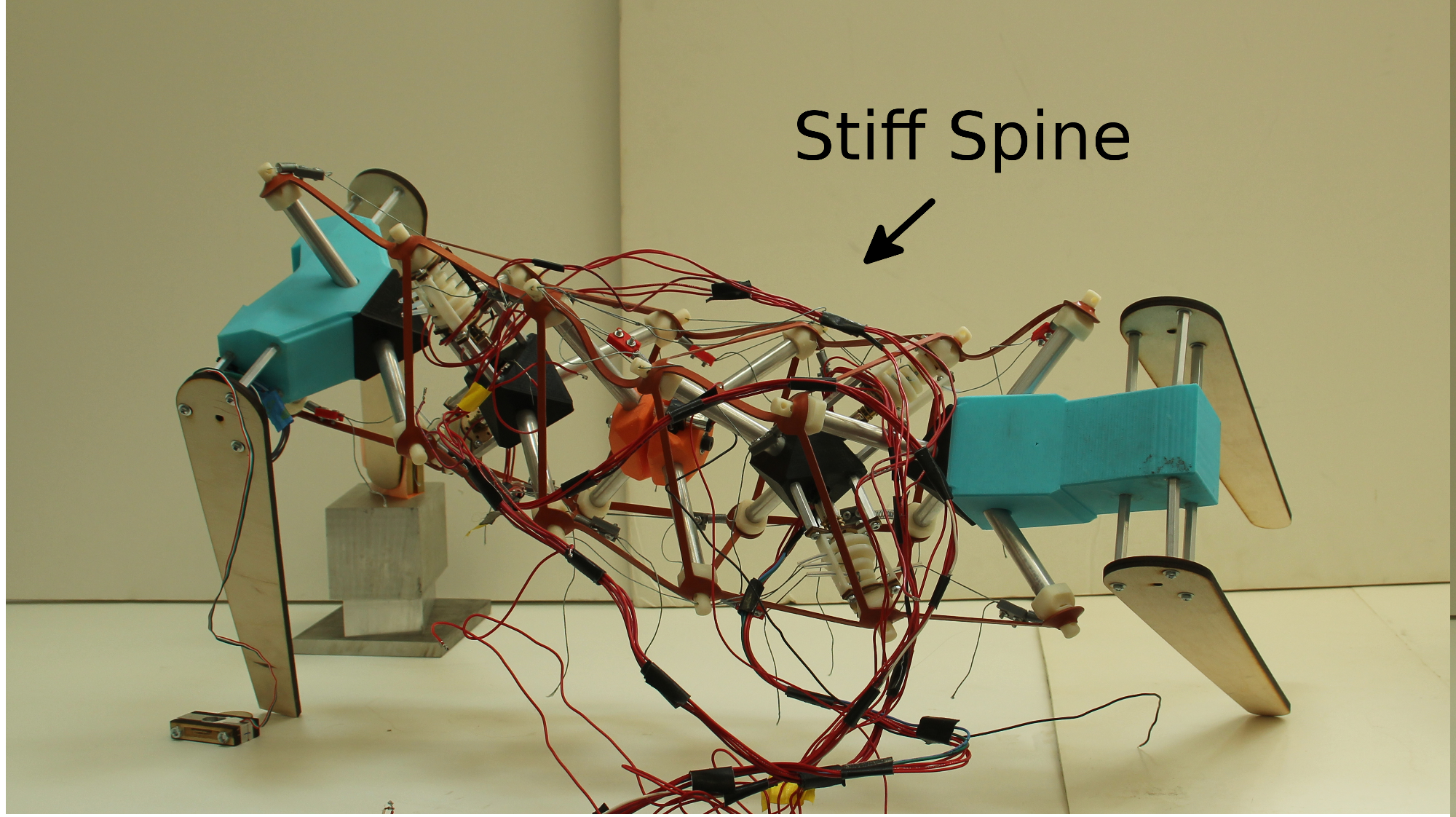
However, when the spine actuates, and rotates, it can balance itself on this uneven terrain:

We’ve simulated this type of spine rotation in our NASA Tensegrity Robotics Toolkit simulator:
During the 2018-2019 school year, we are working on hardware for Belka, the new addition to our robots, which includes moving legs. Our team seeks to have Belka take steps using its spine to propel its legs.
Currently, we have mechanisms that can actuate cables to adjust the spine:
And we have shown that these mechanisms can lift the robot’s legs:
For the spring 2019 semester, we are recruiting undergraduate students at UC Berkeley to design and prototype improved mechanisms for Belka’s legs and hips, towards our goal of walking locomotion.
Contact Drew Sabelhaus for more information: apsabelhaus at berkeley dot edu.
Many thanks to the 2015-2016 ULTRA Spine team! From left to right: Jorge Vizcayno, Ankita Joshi, Zeerek Ahmad, Drew Sabelhaus, Lara Janse van Vuuren, Abishek Akella, and Heeyeon Kwon.