BEST Lab collaborators Adrian Agogino and Vytas SunSpiral from the Intelligent Systems Division of the NASA Ames Research Centerwere recently interviewed by IEEE Spectrum. The article (NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan) and YouTube video were released on December 23, 2013. Since then the article has been propogated world-wide and the video has gone viral with over 373,000 views and still counting. Google has tracked over 60 articles on this story as well. This video is a mash-up by slate video that starts with an old film of the original super ball. More on this project and our collaboration at BEST (Berkeley Emergent Space Tensegrities).
UC Berkeley doctoral students working on the tensegrity robotic research are: Andrew (Drew) Sabelhaus and Kyunam Kim. Five MEng students – Justino Calangi (Advanced Controls, ME), Yangxin Chen (Product Design, ME), Eric Cheng-yu Hong (Visual Computing Graphics, EECS), Yuejia (Margaret) Liu (Computational Manufacturing, ME) and Dizhou Lu (Product Design, ME) are working on the project by designing, building the mechanical components and developing a tensegrity kit for simulation and testing of actuation and control strategies. Deaho Moon is an undergraduate researcher who has been working on the mechanical testing and drop tests.
 |
| Kyunam Kim,Yangxin Chen,Yuejia (Margaret) Liu and Justino Calangi with Professor Alice Agogino at Fung Institute poster session, December 2013. |
This research is on a revolutionary soft robotics concept that integrates biomimetics and tensegrity structures. Tensegrity robots are composed of purely tensile and compressive components (cables and rods). We are exploring co-robot applications (where humans and robots work as partners) since they are unlikely to harm their environment or human users. The application areas we are pursuing include space exploration, home health care and search & rescue.
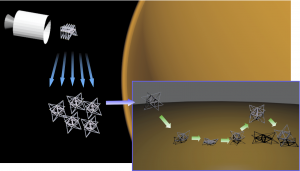
The simulated images and animation (below left) are for the Super Ball Bots application envisioned for space applications where they could deployed and bounce to a landing before moving and exploring the surface. See video of NASA collaborators Adrian Agogino and Vytas SunSpiral explain the structural advantages of tensegrity robots in this article and video (below, right): NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan, IEEE Spectrum, December 2013.
Related News and Publications
- “Presentation on Tensegrity Robots for Planetary Exploration,” NASA Ames, March 21, 2013
- “Super Ball Bot – A Robot Launched by NASA!”, Techbuzzer.com, 19 Feb. 2013
- “NASA’s Crazy Robotics Lab”, BBC News, 3 Feb. 2013
- Super Ball Bot – Structures for Planetary Landing and Exploration with Report and Presentation
- “A Super Ball Bot for Titan: A Baby Step To Learning About Saturn’s Unique Moon”, Astrobiology Magazine, October 10, 2013
- NASA’s Squishable ‘Super Ball Bot’ Could Explore Titan, IEEE Spectrum, December 2013
- NASA’s Super Ball Bot Will Be Exploring The Surface Of TItan, December 2013
- YouTube video: This Jumble of Tent Poles Could Be NASA’s Next Titan-exploring Robot, December 2013 (went viral, with close to 400,000 views and counting)
- NASA’s next robot rover squishes like a child’s toy: Super Ball Bot benefits from a bouncy design, theVerge, December 27, 2013.
- NASA ‘Super Ball Bot’ Can Survive 60-Mile Drop Onto Alien World Without Landing Equipment, International Business Times, December 29, 2013.
- NASA’s Bouncy Super Ball Bots May be Planetary Rovers of the Future [VIDEO], Nature World News, December 30, 2013.
- NASA’s Next Rover May Be This Crazy Walking Sphere, The Atlantic, December 30, 2013.
- NASA Super Ball Bot Would Crash Land… On Purpose: The collapsible, flexible rover can be dropped onto an alien surface from 60 miles away, Robotics Trends, January 2, 2013.