Former BESTie Dr. Kyunam Kim’s postdoc research was featured on the cover of Science Robotics. The paper is based on Kyunam’s work from Caltech and introduces a multimodal locomotion robot (we call it LEO) that combines bipedal legs with propellers to enable uncommon maneuvers like slacklining and skateboarding. It was originally studied in this 2016 IROS paper.
Combining ground locomotion with aerial locomotion is something that Kyunam has been thinking about since when he was working on our tensegrity robots. Indeed, his work on rolling and hopping tensegrity was already a hybrid locomotion robot. It is great that he was able to continue his research in this direction.
SCIENCE ROBOTICS
- VOLUME 6|
- ISSUE 59|
- 6 OCT 2021
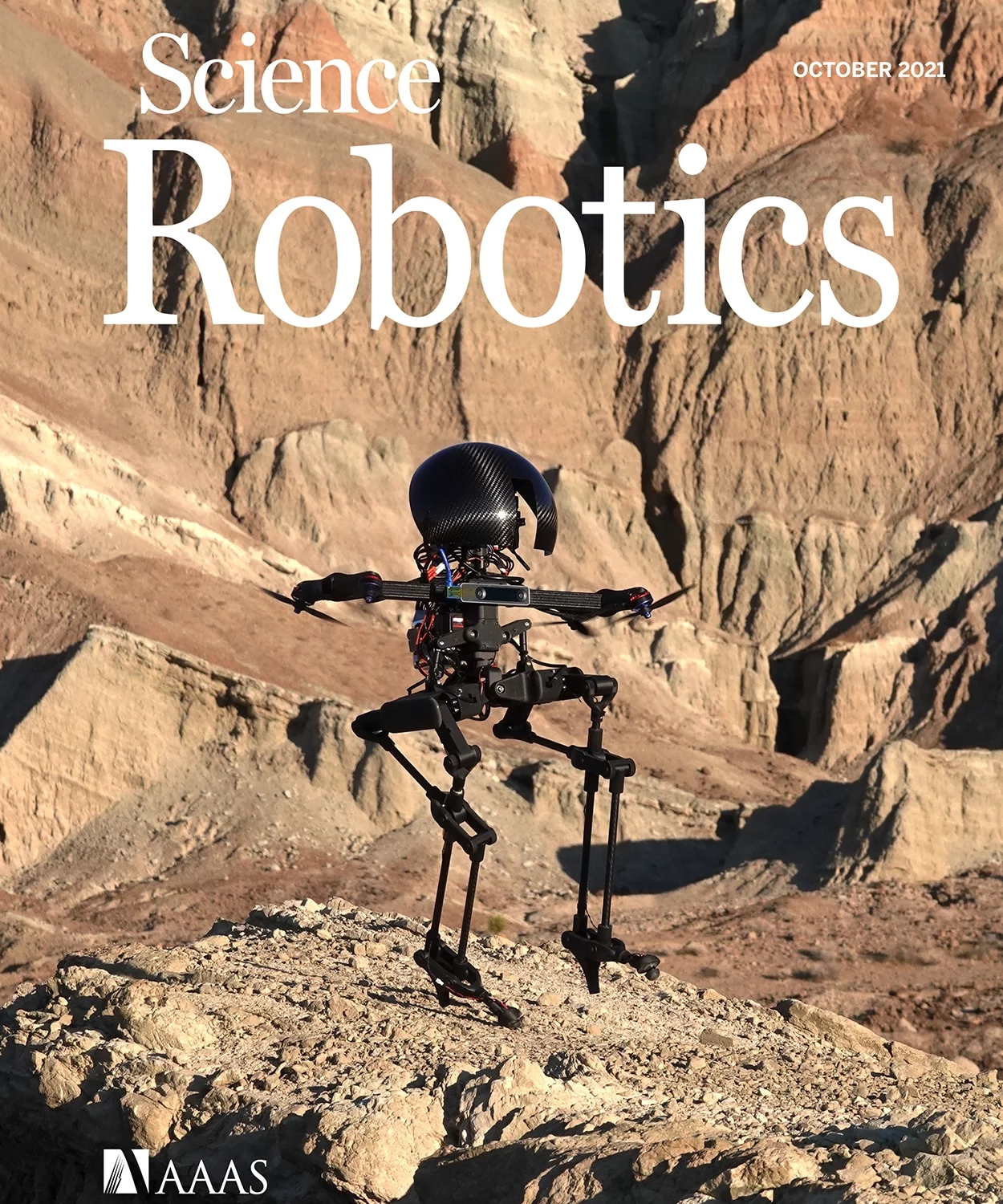
ONLINE COVER: Hop, Skip, and a Jump. Birds and insects can switch between flying and walking with ease. Multimodal locomotion allows these animals to choose the most sensible mode of travel based on their environment. For robots, demonstrating either legged or aerial locomotion is challenging, let alone achieving. Kim et al. have developed a bipedal robot that seamlessly combines legged and aerial locomotion. Their robot, called LEONARDO, is composed of light-weight multijoint legs and propellers. Synchronized control of LEONARDO’s legs and propellers enable maneuvers that require delicate balancing, such as slackline walking and skateboarding. This month’s cover is a photograph of LEONARDO balancing on one leg. See also the Focus by Mintchev.
Credit: Elena-Sorina Lupu, Patrick Spieler, Kyunam Kim, and Soon-Jo Chung
Abstract
Numerous mobile robots in various forms specialize in either ground or aerial locomotion, whereas very few robots can perform complex locomotion tasks beyond simple walking and flying. We present the design and control of a multimodal locomotion robotic platform called LEONARDO, which bridges the gap between two different locomotion regimes of flying and walking using synchronized control of distributed electric thrusters and a pair of multijoint legs. By combining two distinct locomotion mechanisms, LEONARDO achieves complex maneuvers that require delicate balancing, such as walking on a slackline and skateboarding, which are challenging for existing bipedal robots. LEONARDO also demonstrates agile walking motions, interlaced with flying maneuvers to overcome obstacles using synchronized control of propellers and leg joints. The mechanical design and synchronized control strategy achieve a unique multimodal locomotion capability that could potentially enable robotic missions and operations that would be difficult for single-modal locomotion robots.
- Summary video, 3 mins long: https://youtu.be/h3bkvVXsVFM and a shorter version (1 min long)
- The robot is quickly going viral via multiple media channels, and here is one article from IEEE: https://spectrum.ieee.org/bipedal-drone-robot-caltech