
TEAM
PI: Alice Agogino
Funding support: Dennis Chan
Students: Tomas Georgiou (PhD ME), Davide Asnaghi (MEng BioE), Lucie Derbier (MEng BioE), Elizabeth Gomes (MEng ME), Alva Liang (MEng BioE), Pooja Rao (MEng BioE)
Beyond Hands is a project that aims to empower and enable those who are alter-abled to be able to play music using comfortable, easy to use, and adaptable prosthetics. In particular, this projected first focused on developing a prosthetic for playing the drums. Existing drumming prosthetics in the market are either too expensive or are not accurate. Beyond Hands aims to create low-cost drumming prosthetics that operate accurately.
An online survey was conducted to gain a better understanding of the drumming community. The surveys are intended to guide the design process and delineate design criteria for drumming prosthetics. A total of 79 drummers were surveyed from an online drumming community. The goal behind the surveys was to gather information on general playing styles, drumstick grips most often used while playing the drums, drumstick feedback, and other necessary hand movements during performances while playing. From the feedback, the team honed in on a crucial aspect of drumming that is paramount to a drummer’s success: playing.
With a tighter grip on the drumstick, the drummer is able to play controlled individual beats, known as single strokes. With a looser grip on the drumstick, the drummer can utilize the rebound of the drumstick tip off the head of a drum for a quick succession of hits, known as a double stroke.

The double stroke occurs when the drumstick strikes the drum pad, and since the user has a relaxed grip, the drumstick rebounds and strikes the drum pad in a quick succession. To simulate such action, the team has explored variable stiffness mechanisms for controlling the rotational stiffness of the drumstick around a pivot point.
Through the team’s rapid prototyping process, a functional drumming prosthetic that allows the user to differentiate single and double strokes was developed. The designs were compared with other open-source and purchasable drumming prosthetics to contrast the performance and durability. After several iterations and comparisons, a functional prototype was developed.
Twisted String Prototype
This prosthetic uses a method where two bungee cord elements are twisted and wound together. Depending on the number of twists, the relative stiffness of the prosthetic can be tuned to various degrees. Thus, there are stiff and non-stiff conformations for the twisted string prototype.


The twisted string prototype is able to achieve a range of rotational stiffness for an attached drumstick. According to preliminary user feedback, the prototype was easy to learn, as it did not take more than 30 minutes to get accustomed to. The cam design aims to decrease this actuation time and will be tested by users in the future.
In the future, more able-bodied users and alter-abled users will be recruited to test the device and give valuable feedback. We hope that it has the capability to improve user’s quality of life.
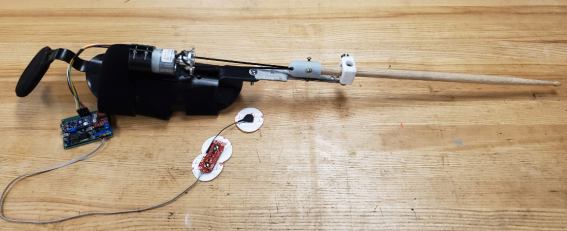
Electronics Sparthan Module
To actuate the drum prosthetic, we used the Sparthan electronics module developed by members of the team. The project was started at the Hong Kong University of Science and Technology (HKUST) and is currently being developed by a joint effort between U.C. Berkeley and HKUST. Project Sparthan is an initiative aimed at providing makers and engineers with a self-contained, programmable module that is capable of actuating five independent brushless DC motors. Project Sparthan aims at lowering barriers to entry in prosthetics and orthotics development by providing user-friendly, EMG-controlled mechatronic modules that can be easily integrated into other projects (https://project-sparthan.github.io/).
References
Kim, Yongtae G., et al. “Drum stroke variation using variable stiffness actuators.” 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2014.